
対応製品
- Jupiter-Pre
本コマンドの目的・用途
指定フェース間に接触設定を定義します。マスター面となるフェース、およびスレーブ面となるフェースを選択し、接触設定を定義します。
コマンドの場所
- 日本語環境:接続 > 接触 > 接触 > SunShine > フェース指定
- 英語環境:Connections > Contacts > Contacts > SunShine > Manual Face
GUI
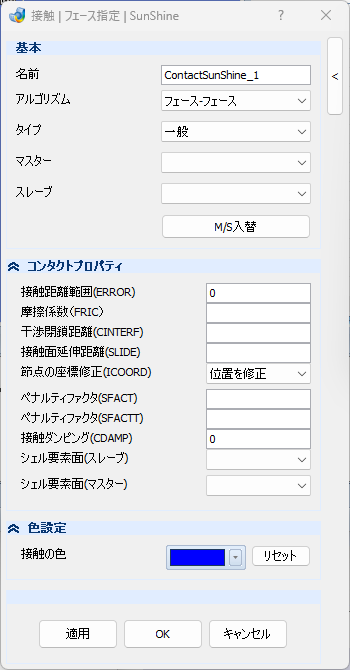

- 基本
-
名前 – テキストボックス
接触対の名称を入力します。
- アルゴリズム – プルダウンメニュー
-
接触設定対象エンティティを選択します。
- フェース – フェース
-
フェース対フェース間接触
- タイプ – プルダウンメニュー
-
接触定義の挙動タイプを選択します。
- 一般接触
-
滑り接触
- 固着
-
固着
- 滑り可能固着
-
法線方向のみ固着されます。
- マスター – プルダウンメニュー
-
マスター面となるフェースを選択します。
- スレーブ – プルダウンメニュー
-
スレーブ面となるフェースを選択します。
- M/S入替
-
マスター/スレーブセグメントグループを切り替えます。
以下はタイププルダウンメニューの選択によって表示されます。
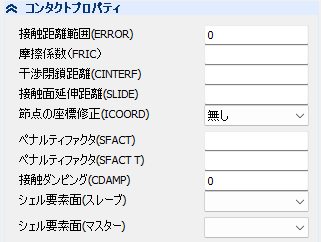
- コンタクトプロパティ
-
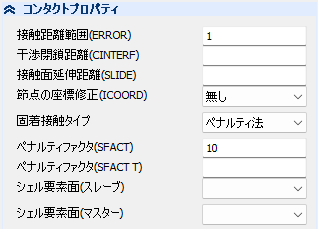
- 接触距離範囲(ERROR) – テキストボックス
-
節点がボディに接触していると見なす距離を入力します。
- 摩擦係数(FRIC) – テキストボックス
-
摩擦係数を入力します。
- 干渉閉鎖距離(CINTERF) – テキストボックス
-
接触フェースに垂直な方向の干渉閉鎖量を入力します。CINTERF>0 の場合はボディ間のオーバーラップ、CINTERF<0 の場合はボディ間のギャップとなります。
- 接触面延伸距離(SLIDE) – テキストボックス
-
接触面延伸距離を入力します。 ICOORD >= 2 でない限り、この入力は行わないでください。接触面延伸距離オプションを使用する場合、セグメント上をスライドする節点は、設定値よりも長い距離場合延伸がオフになります
- 節点の座標修正(ICOORD) – プルダウンメニュー
-
- 無し
-
このオプションを無視します。
- 位置を修正
-
変形可能なボディと接触している節点の座標を変更して、応力のない初期接触が得られるようにします。
- 滑り出し遅れ
-
変形可能なボディの鋭いコーナーでの接線誤差許容値を拡張して、接触したセグメントからのスライドを遅延させます。
- 両方を有効化
-
位置を修正と滑り出し遅れの両方をアクティブにします。
- ペナルティファクタ(SFACT) – テキストボックス
-
ペナルティスケール係数を定義します。
- ペナルティファクタ(SFACTT) – テキストボックス
-
セグメント間の接触解析に使用されるペナルティ係数(剛性)。プログラムは値を計算しますが、ユーザーは値を変更して収束を改善できます。
- 接触ダンピング(CDAMP) – テキストボックス
-
ダンピング係数を入力します。
- シェル要素面(スレーブ) – プルダウンメニュー
-
- 表・板厚考慮
-
表面接触・板厚オフセットを考慮します。
- 表・板厚考慮しない
-
表面接触・板厚オフセットを考慮しません。
- 裏・板厚考慮
-
裏面接触・板厚オフセットを考慮します。
- 裏・板厚考慮しない
-
裏面接触・板厚オフセットを考慮しません。
- シェル要素面(マスター) – プルダウンメニュー
-
- 表・板厚考慮
-
表面接触・板厚オフセットを考慮します。
- 表・板厚考慮しない
-
表面接触・板厚オフセットを考慮しません。
- 裏・板厚考慮
-
裏面接触・板厚オフセットを考慮します。
- 裏・板厚考慮しない
-
裏面接触・板厚オフセットを考慮しません。
- 色設定
-
接触対表示マーカー色を定義します。
- 接触の色 – プルダウンメニュー
-
接触設定箇所に設定する色を指定します。
- リセット – ボタン
-
デフォルト色に初期化します。
操作手順
- マスターでマスター面となるフェースを選択します。続いてスレーブでスレーブ面となるフェースを選択します。
- 必要により接触対に対する詳細設定を定義し、適用(OK)ボタンをクリックして接触対を定義します。