
対応製品
- Jupiter-Pre
本コマンドの目的・用途
解析モデルに力、モーメント荷重を追加します。
コマンドの場所
- 日本語環境:境界条件 > 荷重 > 力 > 一般
- 英語環境:Boundary > Loads > Force > General
GUI
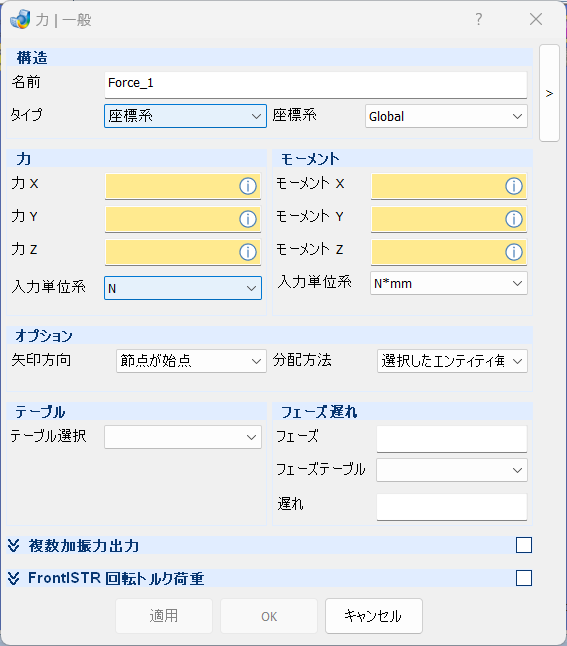
- 構造
-
- 名前 – テキストボックス
-
荷重条件の名前を入力します。
- タイプ – プルダウンメニュー
-
力の方向を定義するために、座標系またはベクトル方向を指定します。
- 座標系 – プルダウンメニュー
-
座標系を指定します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
下記項目は構造>タイプの選択によって変化します
座標系を指定します。

- 力
- モーメント
-
- モーメント X – テキストボックス
-
座標系X方向のモーメント値を入力します。
- モーメント Y – テキストボックス
-
座標系Y方向のモーメント値を入力します。
- モーメント Z – テキストボックス
-
座標系Z方向のモーメント値を入力します。
- 入力単位系 – プルダウンメニュー
-
モーメント値の入力単位を指定します。[N*mm], [N*m], [mN*mm], [kgf*mm], [lbf*ft], [lbf*in], [tf*m]から選択可能です。
- オプション
-
- 矢印方向 – プルダウンメニュー
-
荷重マーカーの表示を調整します。
- 節点が始点
-
マーカーの矢印が荷重を与えた節点から始まります。
- 節点が終点
-
マーカーの矢印が荷重を与えた節点で終わります。
- 分配方法 – プルダウンメニュー
-
入力した荷重の分配方法を指定します。
- 選択したエンティティ毎
-
選択したエンティティごとに荷重値を与えます。
- 節点毎
-
選択したエンティティ上の節点に等しく荷重値を与えます。
- 選択したエンティティの合計
-
選択したエンティティ上の合計値が荷重値になります。
- テーブル
-
- テーブル選択 – プルダウンメニュー
-
フィールドデータで定義します。現在サポートされていません。
- フェーズ遅れ
-
- フェーズ – テキストボックス
-
位相を入力します。
- フェーズテーブル – プルダウンメニュー
-
フィールドデータで入力した位相テーブルを選択します。
- 遅れ – テキストボックス
-
遅れを入力します。
- 複数加振力出力 – チェックボックス
-
各自由度方向の荷重を一括定義.設定した自由度毎に荷重がそれぞれ作 成されます。
- 変位X – テキストボックス
-
並進X方向荷重用周波数テーブルを指定。Values-Translation Xの入力必須。
- 変位Y – テキストボックス
-
並進Y方向荷重用周波数テーブルを指定。Values-Translation Yの入力必須。
- 変位Z – テキストボックス
-
並進Z方向荷重用周波数テーブルを指定。Values-Translation Zの入力必須。
- 回転X – テキストボックス
-
X軸回転方向荷重用周波数テーブルを指定。Values-Rotation Xの入力必須。
- 回転Y – テキストボックス
-
Y軸回転方向荷重用周波数テーブルを指定。Values-Rotation Yの入力必須。
- 回転Z – テキストボックス
-
Z軸回転方向荷重用周波数テーブルを指定。Values-Rotation Zの入力必須。
- FrontISTR 回転トルク荷重 – チェックボックス
-
- 回転トルク中心 – プルダウンメニュー
-
回転トルク中心を定義します。通常は1節点のみです。
操作手順
①通常の荷重定義
- 選択リストからフェース、エッジ、節点のいずれかのボタンを選択し、画面上から荷重付加対象を選択します。
- 荷重につける名前を入力します。
- 必要に応じて座標系を選択します。
- 荷重値、モーメント値をX,Y,Z方向ごとに入力します。
- 必要に応じて矢印方向と分配方向を変更します。
- 適用またはOKボタンを押します。
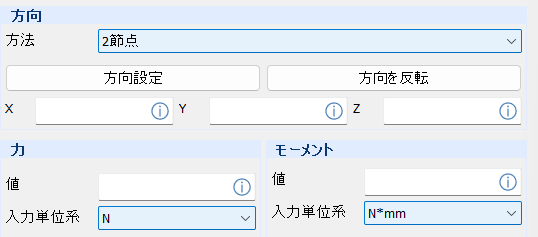
②2節点方向の荷重定義
- タイプからベクトルを選択します。
- 方法から2節点を選択します。
- 画面上から節点を2つ選択します。
- 方向設定ボタンを押します。
- 選択リストからフェース、エッジ、節点のいずれかのボタンを選択し、画面上から荷重付加対象を選択します。
- 値に荷重値を入力します。
- 必要に応じて矢印方向と分配方向を変更します。
- 適用またはOKボタンを押します。