目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
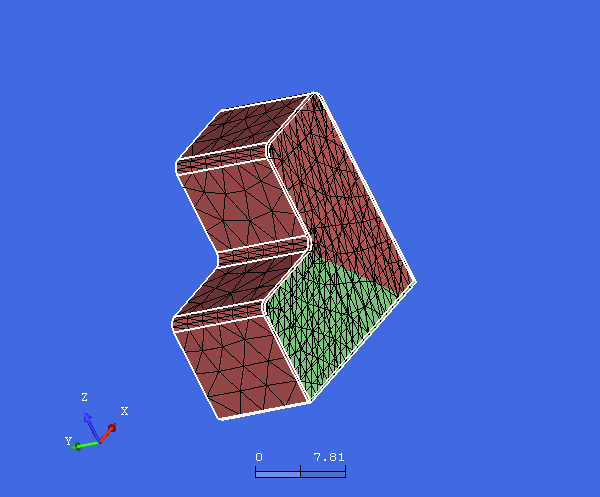
選択したパート同士を形状の特徴をもとに位置合わせします。
ICP(Iterative closest point)法を使用しています。 2つの点群同士の対応する点を見つけ、その誤差を最小にするように繰り返し計算する手法です。
コマンドの場所
- 日本語環境:ジオメトリー > パート移動 > 移動 > ベストフィット
- 英語環境:Geometry > Transform Part > Transform > Best Fit
GUI
項目の説明
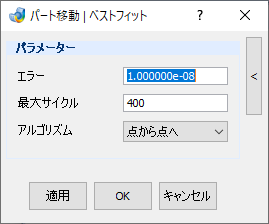
- パラメーター
-
- エラー – テキストボックス
-
節点間の距離の差の合計値です。この値以内になるまで計算を繰り返します。
- 最大サイクル – テキストボックス
-
マトリックス計算の繰り返し数です。大きすぎると計算に時間がかかりますが、小さすぎると十分に値が収束せず、位置合わせが中途半端になる可能性があります。1以上を指定します。
- アルゴリズム – プルダウンメニュー
-
“点から点へ”のみ選択可能です。選択したフェース/パート内に含まれる節点の集合を定義し、静的ターゲット・動的ターゲットそれぞれの点集合より算出される形状同士ができるだけ一致するように、動的ターゲット側のパートを移動させます。
操作手順
操作手順(パート選択)
STEP
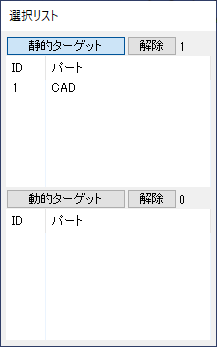
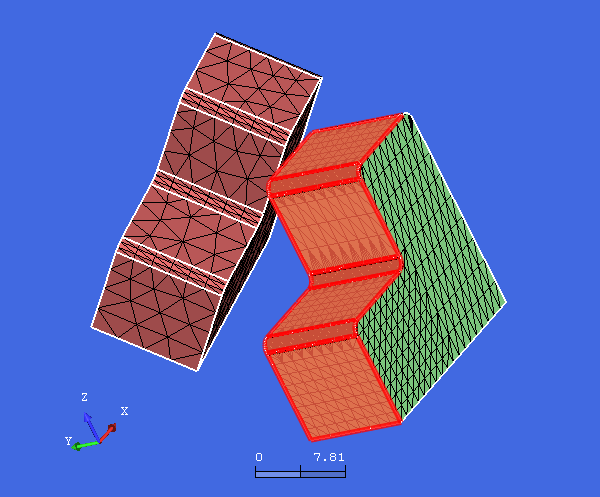
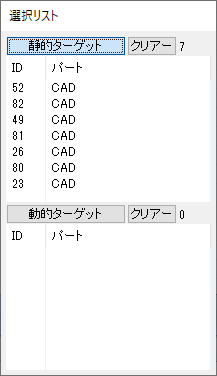
移動先の指定
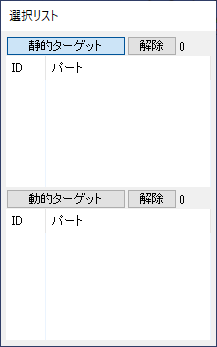
選択リストの「静的ターゲット」をクリックし、移動先となるパートを選択します。
STEP
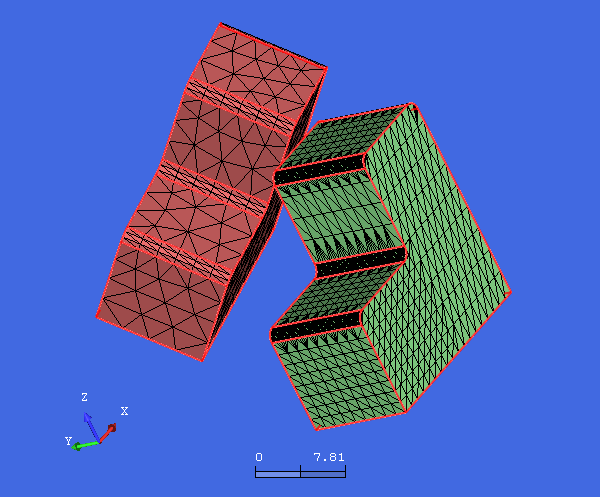
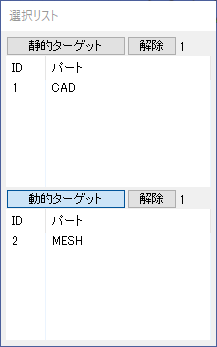
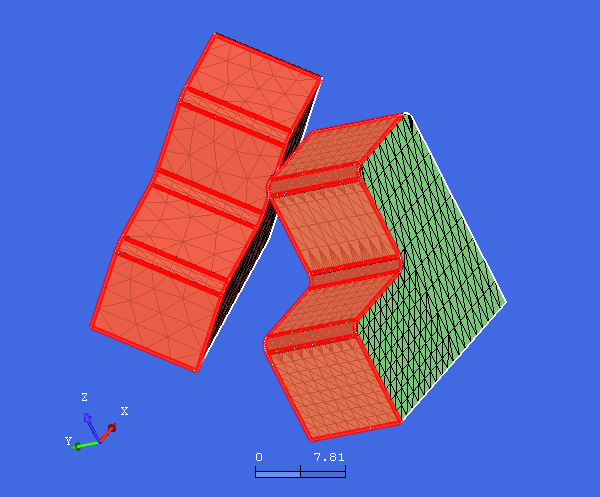
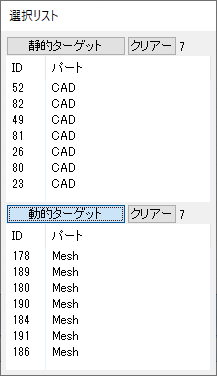
移動させるパートの選択
選択リストの「動的ターゲット」をクリックし、移動させたいパートを選択します。
STEP
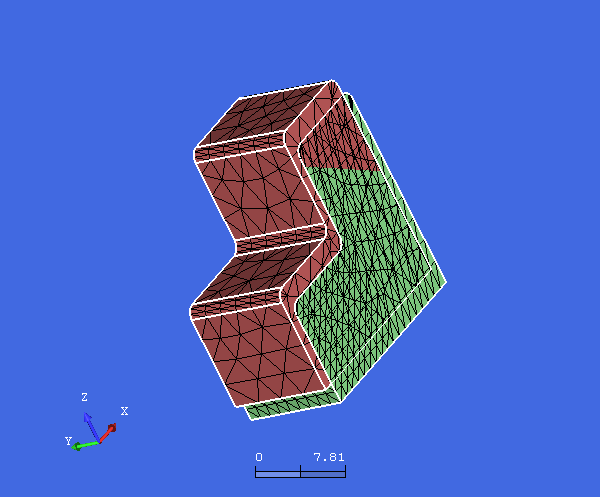
機能実行
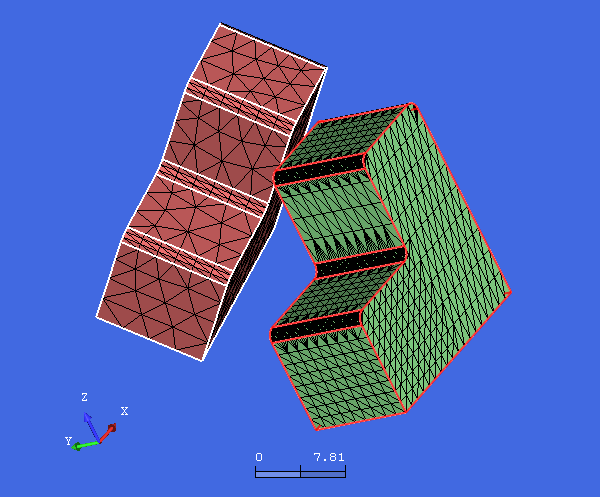
[適用]または[OK]ボタンをクリックします。形状の特徴に沿って、近い位置まで移動します。
操作手順(フェース選択)
STEP
移動先の指定
選択リストの「静的ターゲット」をクリックし、移動先となるパート上のフェースを選択します。
STEP
移動させるパートの選択
選択リストの「動的ターゲット」をクリックし、移動させたいパート上のフェースで、移動先フェースと位置合わせしたいフェースを選択します。
STEP
機能実行
[適用]または[OK]ボタンをクリックします。形状の特徴に沿って、近い位置まで移動します。