
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
選択したフェース、エッジ、節点に強制加速度荷重を定義します。
対応ソルバー:Nastran Sol111、Sol112/ADVC静解析/Abaqus静解析(Ansys/LSDynaは未対応)
コマンドの場所
- 日本語環境:境界条件 > 荷重 > 強制荷重 > 強制加速度
- 英語環境:Boundary > Loads > Enforced Loads > Enforced Acceleration
GUI
項目の説明
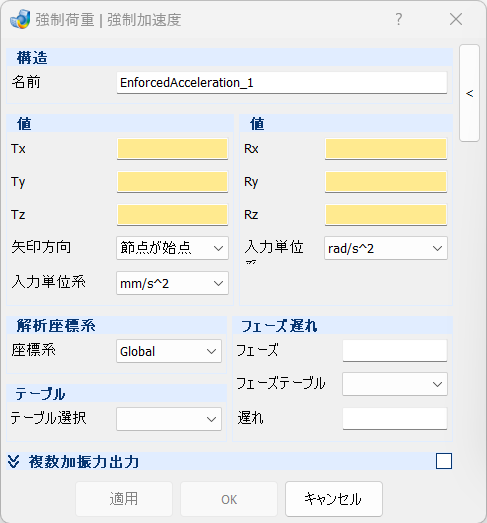
- 構造
-
- 名前 – テキストボックス
-
強制加速度荷重名を設定します。
- 値
-
- Tx/Ty/Tz – テキストボックス
-
X,Y,Z並進方向の強制加速度値を設定します。
- 矢印方向 – プルダウンメニュー
-
マーカー表示の描画位置の指定をします。
- 節点が始点
-
節点を始点として、マーカーを表示します。
- 節点が終点
-
節点を終点として、マーカーを表示します。
- 入力単位系 – プルダウンメニュー
-
入力単位を指定します。(V3.0未対応)[mm/s^2], [m/s^2], [ft/s^2], [in/s^2], [g], [Gal]から選択可能です。
- 値
-
- Rx/Ry/Rz – テキストボックス
-
X,Y,Z回転方向の強制加速度値を設定します。
- 入力単位系 – プルダウンメニュー
-
入力単位を指定します。※デフォルト値をドキュメント単位系にします。[rad/s^2], [deg/s^2] から選択可能です。
- 解析座標系
-
- 座標系 – プルダウンメニュー
-
荷重の負荷方向の参照座標系を選択します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
- テーブル
-
- テーブル選択 – プルダウンメニュー
-
時刻歴、周波数を参照するテーブルを選択します。
- フェーズ遅れ
-
- フェーズ – テキストボックス
-
荷重の位相を入力します。
- フェーズテーブル – プルダウンメニュー
-
荷重の位相テーブルを選択します。
- 遅れ – テキストボックス
-
荷重の遅れ値を入力します。
- 複数加振力出力 – チェックボックス
-
- 変位 X/変位 Y/変位 Z – プルダウンメニュー
-
X,Y,Z並進方向の複数点入力のテーブルを選択します。
- 回転 X/回転 Y/回転 Z – プルダウンメニュー
-
X,Y,Z回転方向の複数点入力のテーブルを選択します。
操作手順
- 強制加速度荷重を負荷するフェース、エッジ、節点を選択します。複数の選択が可能です。
- 荷重方向に従い、それぞれ並進と回転のX,Y,Zに荷重値を入力します。
- 必要に応じて他のパラメータを選択、入力します。
- 適用またはOKボタンをクリックします。