
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
剛体壁を設定します。
コマンドの場所
- 日本語環境:接続 > 接触 > 剛体壁
- 英語環境:Connection > Contacts > Rigid Wall
GUI
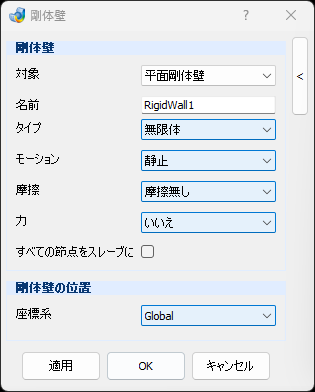
項目の説明
- 剛体壁
-
- 対象 – プルダウンメニュー
-
剛体壁の対象は平面剛体壁です。
- 名前 – テキストボックス
-
剛体壁の名前を入力します。
- タイプ – プルダウンメニュー
-
剛体壁のタイプを指定します。無限体もしくは有限体から選択します。
-
- 無限体
-
無限体
- 有限体
-
有限体
- モーション – プルダウンメニュー
-
挙動を指定します。静止もしくは可動から選択します。
- 静止
- 可動
- 摩擦 – プルダウンメニュー
-
摩擦の条件を下記より指定します。
- 摩擦無し
- 滑り無し
- クーロン摩擦
- 摩擦無し溶着
- 滑り無し溶着
- 力
-
反力の考慮の有無を指定します。
- はい
-
反力を考慮しません。
- いいえ
-
反力を考慮します。
- すべての節点をスレーブに – チェックボックス
-
チェックを入れると全ての節点を従属点にします。
- 剛体壁の位置
-
座標系で剛体壁の位置を決定します。
- 座標系 – プルダウンメニュー
-
座標系を選択します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
操作手順
- 名前を入力します。
- 作成する剛体壁のタイプを指定します。
- モーションを選択します。
- 摩擦の条件を指定します。
- 反力の有無を指定します。
- 必要に応じて「すべての節点をスレーブに」にチェックを入れます。
- 座標系を指定します。
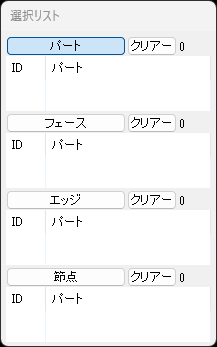
- エンティティを選択し、適用またはOKボタンをクリックします。