
対応製品
- Jupiter-Pre
本コマンドの目的・用途
選択されたパートを回転します。
コマンドの場所
- 日本語環境:ジオメトリー > パート移動 > 移動 > 回転
- 英語環境:Geometry > Transform Part > Transform > Rotation
GUI
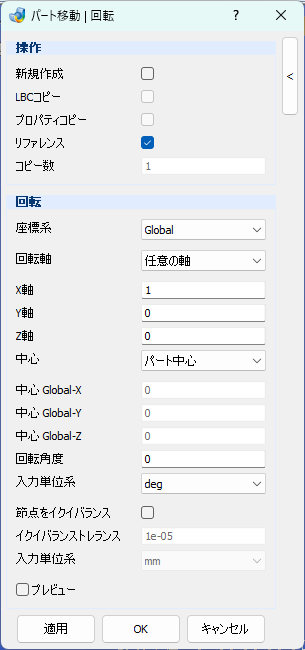
- 操作
-
- 新規作成 – チェックボックス
-
移動後にパートをコピーし、新規パートとします。新規パートの名称は、元パート名_ROTとなります。
- LBCコピー – チェックボックス
-
新規パートに既存パートに付加した荷重境界条件もコピーします。
- プロパティコピー – チェックボックス
-
新規パートに既存パートに付加したプロパティもコピーします。
- リファレンス – チェックボックス
-
新規パートに既存パートに付加したリファレンスもコピーします。
- コピー数 – テキストボックス
-
コピーの繰り返し数を入力します。
- 回転
-
- 座標系 – プルダウンメニュー
-
参照する座標系を選択します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
- 回転軸 – プルダウンメニュー
-
回転軸を選択します。
- X軸
-
選択された座標系のX軸回りに回転します
- Y軸
-
選択された座標系のY軸回りに回転します。
- Z軸
-
選択された座標系のZ軸回りに回転します。
- 任意の軸
-
X、Y、Zの方向ベクトルで指定された軸回りにアングル分回転します。
- 2 節点
-
画面から選択された2つの節点方向の軸回りにアングル分回転します。
- エッジ
-
画面から選択されたエッジ方向の軸回りにアングル分回転します。
- X軸 – テキストボックス
-
回転軸のX成分が表示されます。任意の軸指定時は入力して軸を指定します。
- Y軸 – テキストボックス
-
回転軸のY成分が表示されます。任意の軸指定時は入力して軸を指定します。
- Z軸 – テキストボックス
-
回転軸のZ成分が表示されます。任意の軸指定時は入力して軸を指定します。
- 中心 – プルダウンメニュー
-
回転の中心位置を決めます。
- パート中心
-
パートの中心を回転中心にします。
- 節点
-
画面から選択した節点を回転の中心にします。
- 入力
-
回転中心(グローバル座標系で指定)を中心 Global-X、中心 Global-Y、中心 Global-Zに入力します。
- 中心 Global-X – テキストボックス
-
回転中心位置のX座標を入力します。
- 中心 Global-Y – テキストボックス
-
回転中心位置のY座標を入力します。
- 中心 Global-Z – テキストボックス
-
回転中心位置のZ座標を入力します。
- 回転角度 – テキストボックス
-
回転角度を入力します。
- 入力単位系
-
入力単位を指定します。[deg], [rad], から選択可能です。
- 節点をイクイバランス – チェックボックス
-
チェックするとモデル内に回転コピーされたボディのフェースが、コピー元のボディのフェースと接する場合にその節点を結合します。
- イクイバランストレランス
-
節点総合判定のトレランスを入力します。
- 入力単位系
-
入力単位を指定します。[mm], [m], [in], [ft], [cm] から選択可能です。
- プレビュー – チェックボックス
-
プレビューを表示します。
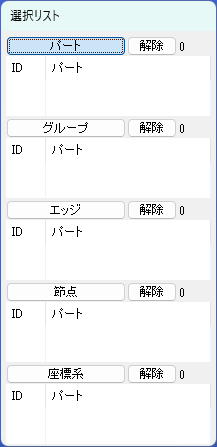
操作手順
- 回転後に新しいパートを作成する場合は、新規作成をオンにします。
- 既存パートの荷重拘束条件を新規パートにコピーするには境界条件コピーをオンにします。
- 繰り返しコピーする場合は、コピー数を入力します。
- グループボタンまたはパートボタンを押し、画面から回転対象のグループまたはパートを選択します。
- 既存の座標系軸回りに回転させる場合は、座標系から既存の座標系を選択し、回転軸からX軸、Y軸、Z軸のいずれかを選択します。
- 任意の方向に回転させる場合は、回転軸から任意の軸を選択し、X、Y、Z入力ボックスに方向ベクトルを入力します。
- 選択した2節点方向に回転させる場合は、回転軸から2節点を選択し、画面から節点を2つ選択します。
- 選択したエッジ方向に移動させる場合は、回転軸からエッジを選択し、画面からエッジを選択します。
- パートの中心を回転中心にする場合は、中心からパート中心を選択します。
- パートの中心を節点位置にする場合は、中心から節点を選択し、画面から節点をピックします。
- パートの中心を直接入力にする場合は、中心からインプットを選択し、回転中心を中心 Global-X、中心 Global-Y、中心 Global-Zにグローバル座標系の座標値で入力します。
- 回転角度に回転する角度を入力します。
- コピー後の節点を元のパートとマージする場合は、節点をイクイバランスをオンにし、イクイバランストレランスに結合判定許容値を入力します。
- 適用/OKボタンをクリックします。