
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
解析モデルに座標系を参照する回転運動荷重を追加します。
コマンドの場所
- 日本語環境:境界条件 > 荷重 > パート荷重 > 回転運動荷重 > 座標系
- 英語環境:Boundary > Loads > Body Loads > Rotational Motion Load > Coordinate System
GUI
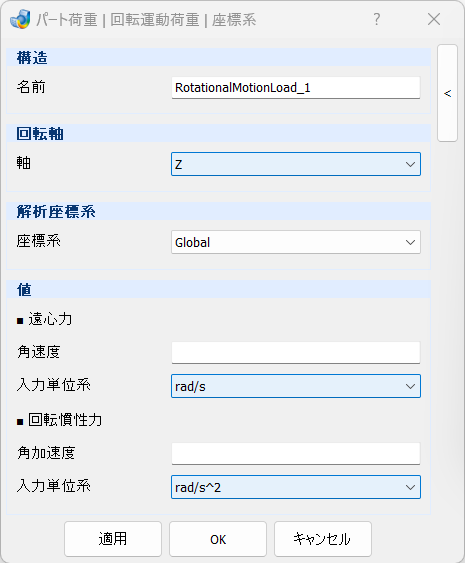
項目の説明
- 構造
-
- 名前 – テキストボックス
-
回転運動荷重条件の名前を入力します。
- 回転軸
-
- 軸 – プルダウンメニュー
-
回転軸を座標系のX、Y、Z軸から選択します。
- 解析座標系
-
- 座標系 – プルダウンメニュー
-
回転運動荷重が参照する座標系を選択します。(対応ソルバー:Nastran)初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります
- 値
-
- 遠心力
-
- 角速度 – テキストボックス
-
角速度量を入力します。
- 入力単位系 – プルダウンメニュー
-
角速度量の入力単位を指定します。[rad/s], [deg/s], [rpm], から選択可能です。
- 回転慣性力
-
- 角加速度 – テキストボックス
-
角加速度量を入力します。
- 入力単位系 – プルダウンメニュー
-
角加速度量の入力単位を指定します。[rad/s^2], [deg/s^2], から選択可能です。
操作手順
- 荷重につける名前を入力します。
- 回転軸をX、Y、Zのリストから選択します。
- 座標系フレームを既存の座標系リストから選択します。
- 角速度量を入力します。必要に応じて入力単位を変更できます。
- 角加速度量を入力します。必要に応じて入力単位を変更できます。
- 適用またはOKボタンを押します。