
目次
対応製品
- Jupiter-Post
本コマンドの目的・用途
ひずみゲージの方向に沿ったひずみ/応力を計算し、表示します。軸からの角度は、2つの軸からなる平面上で、最初に定義した軸からの入力された回転角度の応力・ひずみのデータを表示します。
コマンドの場所
- 日本語環境:計算 > データサーチ > ひずみゲージ > 軸からの角度
- 英語環境:Calculation > Data Search > StrainGauge > Axis with Angle
GUI
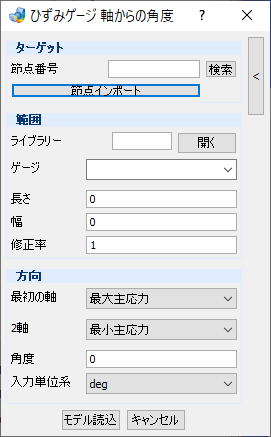
項目の説明
- ターゲット
-
- 節点番号 – テキストボックス
-
入力節点のデータを取得します。
- 検索 – ボタン
-
入力した節点を選択できます。
- 節点インポート – ボタン
-
軸からの角度では機能しません。
- 範囲
-
- ライブラリー – テキストボックス
-
開発中
- 開く – ボタン
-
開発中
- ゲージ – プルダウンメニュー
-
開発中
- 長さ – テキストボックス
-
節点をピックした時の選択範囲の長さを指定します。
- 幅 – テキストボックス
-
節点をピックした時の選択範囲の幅を指定します。
- 修正率 – テキストボックス
-
ひずみ解析結果に掛かる補正用の係数です。
- 方向
-
- 最初の軸 – プルダウンメニュー
-
最初の軸を最大主応力、最小主応力、中間主応力から選択します。
- 最大主応力
-
最大主応力を選択します。
- 最小主応力
-
最小主応力を選択します。
- 中間主応力
-
中間主応力を選択します。
- 2 軸 – プルダウンメニュー
-
2 つめの軸を最大主応力、最小主応力、中間主応力から選択します。
- 最大主応力
-
最大主応力を選択します。
- 最小主応力
-
最小主応力を選択します。
- 中間主応力
-
中間主応力を選択します。
- 角度 – テキストボックス
-
回転角度を入力します。
- 入力単位系 – プルダウンメニュー
-
回転角度の単位を指示します。[rad], [deg]から選択可能です。
- モデル読込 – ボタン
-
実モデルでのひずみゲージの位置を参照するための表面形状(スキャンデータなど)を読み込みます。
Noteひずみゲージ機能にある AmendFactor(修正率)、GaugeFactor(ゲージ率)は、ひずみ解析結果に掛かる補正用の係数となり、下記式で計算されます。
- ε=AmendFactor × εi
- ε=(2./AmendFactor) × εi (Tangent Projection(接線方向)で使用)
- ε:ひずみゲージ結果(補正後)
- εi:指定方向のひずみ解析結果
それぞれデフォルト値は下記の通りで、ひずみ解析結果に掛かる係数はデフォルトでどちらも 1 となります。
- AmendFactor: 1. (Tangent Projection の時、2./ GaugeFactor = 1.)
操作手順
- ひずみ結果をコンター表示します。中間節点結果を含める場合は、中間節点使用を有効にします。
- 計算>データサーチ>ひずみゲージ>軸からの角度コマンドを起動します。
- 長さ、幅にゲージ長さ、幅を入力します。
- 角度を指定し、モデルウィンドウ上で節点を選択すると、各節点における指定角度方向の軸からの角度のひずみの平均値が、ノートおよびウォッチウィンドウに表示されます。