
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
2フェース間にコネクター要素を作成します。
コマンドの場所
- 日本語環境:接続 > 詳細 > コネクター > フェース-フェース間
- 英語環境:Connection > Details > Connector > Face to Face
GUI
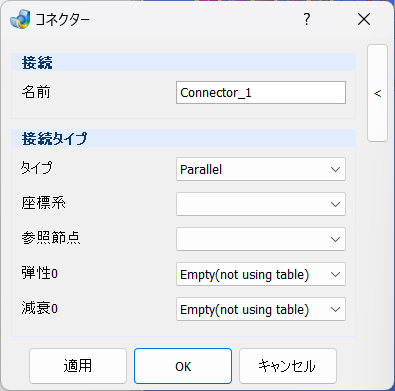
項目の説明
- 接続
-
- 名前 – テキストボックス
-
作成するコネクター要素の名前を設定します。
- 接続タイプ
-
- タイプ – プルダウンメニュー
-
コネクションタイプを定義します。
タイプ 有効軸番号 拘束軸番号 Parallel 0 なし Translation 0 , 1 , 2 なし Rotation 3 , 4 , 5 なし Bushing 0 , 1 , 2 , 3 , 4 , 5 なし Cylindrical 0 , 3 1 , 2 , 4 , 5 Joint なし 0 , 1 , 2 RigidRod なし 0 RigidBar なし 0 , 1 , 2 , 3 , 4 , 5 - 座標系 – プルダウンメニュー
-
特性の方向を定義します。
- Global
-
全体座標系で方向を定義します。
- Elm
-
2点の節点から定義します。
- 参照節点 – プルダウンメニュー
-
座標系を決めるときに参照する節点を指定します。
- 0
-
第1節点を参照します。
- 1
-
第2節点を参照します。
- 弾性0 – プルダウンメニュー
-
弾性特性のテーブルデータを設定します。
- 減衰0 – プルダウンメニュー
-
粘性特性のテーブルデータを設定します。
Tips各特性のテーブルデータは フィールドデータコマンドで作成します。
・ 弾性特性テーブルタイプ:Displacement, Force
・ 粘性特性テーブルタイプ:Velocity, Force
操作手順
- 境界条件 > フィールドデータ より、テーブルデータを作成します。
- 接続 > コネクター > フェース-フェース間 をクリックします。
- 接続タイプをそれぞれ指定します。
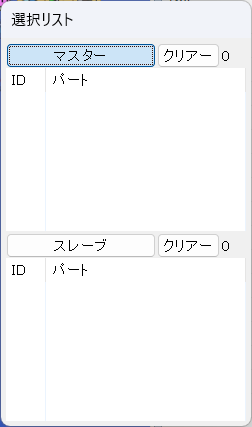
- 選択リストを開き、マスターとスレーブとなるフェースをそれぞれ選択します。
- 適用 / OKボタンをクリックします。
Tips
【タイプ】で指定する自由度が選択でき、「Translation」にすることで並進3方向の入力が可能となります。(X軸のみであればデフォルトのままで問題ありません。)