
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
選択した2つのエッジ上の節点間にギャップ要素を作成します。
コマンドの場所
- 日本語環境:接続 > 詳細 > ギャップ > 2エッジ
- 英語環境:Connection > Details > Gaps > 2 Edges
GUI
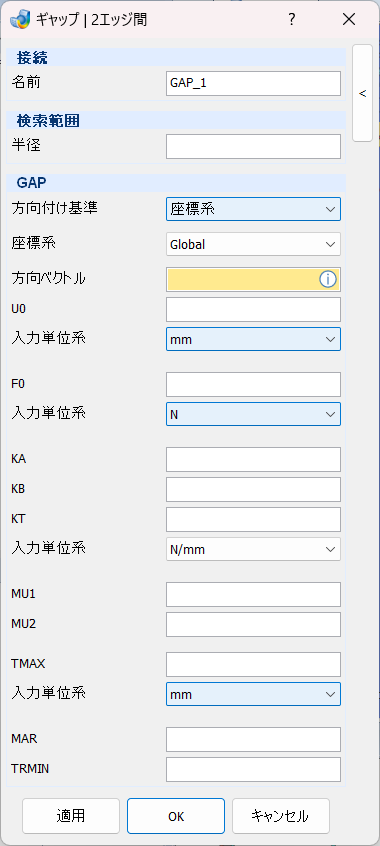
項目の説明
- 接続
-
- 名前 – テキストボックス
-
作成するギャップ要素名を設定します。
- 検索範囲
-
- 半径 – テキストボックス
-
接続する2節点間の距離を指定します。これを超える節点間にはギャップ要素は作成されません。
- GAP
-
- 方向付け基準 – プルダウンメニュー
-
ギャップ要素の方向付けの方法を選択します。
- 方向ベクトル
-
方向ベクトルによる指定
- 座標系
-
座標系による指定
- 座標系 – プルダウンメニュー
-
座標系による指定を選択した場合に、使用する既存の座標系をリストから選択します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
- 方向ベクトル – テキストボックス
-
方向ベクトルによる指定を選択した場合に、方向ベクトルをX,Y,Zの順にコンマ区切りで入力します。
- U0 – テキストボックス
-
初期ギャップ開き量を入力します。
- 入力単位系 – プルダウンメニュー
-
長さの単位を選択します。[mm], [m], [ft], [in], [cm]から選択可能です。
- F0 – テキストボックス
-
初期荷重値を入力します。
- 入力単位系 – プルダウンメニュー
-
力の単位を選択します。[N], [mN], [kN], [kgf], [lbf], [tf]から選択可能です。
- KA – テキストボックス
-
閉じたギャップに対する軸剛性値を入力します。
- KB – テキストボックス
-
開いたギャップに対する軸剛性値を入力します。
- KT – テキストボックス
-
ギャップが閉じている時の横せん断剛性値を入力します。
- 入力単位系 – プルダウンメニュー
-
入力単位系を指示します。[N/mm], [N/m], [mN/mm], [kgf/mm], [lbf/ft], [lbf/in]から選択可能です。
- MU1 – テキストボックス
-
アダプティブギャップ要素の静摩擦係数値を入力します。
- MU2 – テキストボックス
-
アダプティブギャップ要素の動摩擦係数値を入力します。
- TMAX – テキストボックス
-
ペナルティ値調整に用いる最大許容貫通量を入力します。
- 入力単位系 – プルダウンメニュー
-
長さの単位を選択します。[mm], [m], [ft], [in], [cm]から選択可能です。
- MAR – テキストボックス
-
アダプティブペナルティ値KAおよびKTに対する最大許容調整比を入力します。
- TRMIN – テキストボックス
-
許容貫通量の下限を定義するTMAXの比率を入力します。
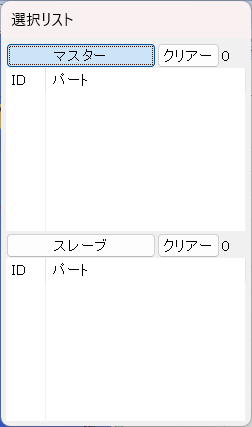
操作手順
- 選択リストのマスターボタンがアクティブであるのを確認し、ギャップ要素の一端の節点が含まれるエッジを選択します。
- 選択リストがスレーブボタンに切り替わったのを確認し、ギャップ要素の他端の節点が含まれるエッジを選択します。
- 節点ペアの接続範囲をその節点間距離で制限する場合には、検索範囲の半径に距離を入力します。
- 方向ベクトルの指定方法を方向付け基準から選択します。指定方法に従って方向ベクトルを入力します。
- それぞれの入力欄にギャップ要素の軸剛性などの数値を入力します。必要に応じて入力単位系から長さと力の単位を選択します。
- 適用またはOKボタンを押すとギャップ要素が節点間に作成されます。