
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
1節点と複数エッジ間でMPCを作成する機能です。
スレーブ自由度 – マスター自由度 = パラメータ値 のMPC式を生成します。
コマンドの場所
- 日本語環境:接続 > 詳細 > MPC > 一般 > 節点 – エッジ
- 英語環境:Connections > Details > MPC > General > Node – Edges
GUI
項目の説明
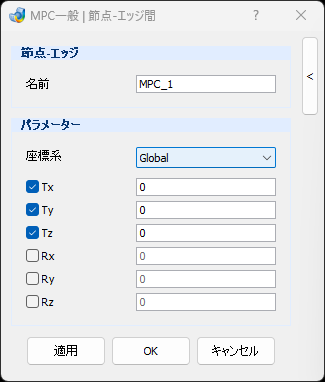
- 節点-エッジ
-
- 名前 – テキストボックス
-
登録される名前を入力します。
- パラメーター
-
- 座標系 – プルダウンメニュー
-
初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります
- Tx – テキストボックス
-
並進方向(X)の拘束を指定します。
- Ty – テキストボックス
-
並進方向(Y)の拘束を指定します。
- Tz – テキストボックス
-
並進方向(Z)の拘束を指定します。
- Rx – テキストボックス
-
回転方向(X)の拘束を指定します。
- Ry – テキストボックス
-
回転方向(Y)の拘束を指定します。
- Rz – テキストボックス
-
回転方向(Z)の拘束を指定します。
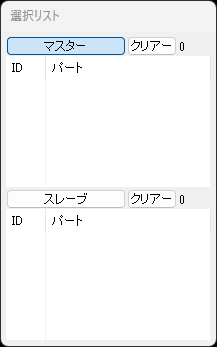
操作手順
- マスターの節点を選択します。
- スレーブのエッジを選択します。
- パラメーターを設定します。
- 適用/OKボタンをクリックします。
マスター節点とエッジ上の各スレーブ節点間に、各自由度毎のMPCが複数作成されます。