
目次
対応製品
- Jupiter-Pre
本コマンドの目的・用途
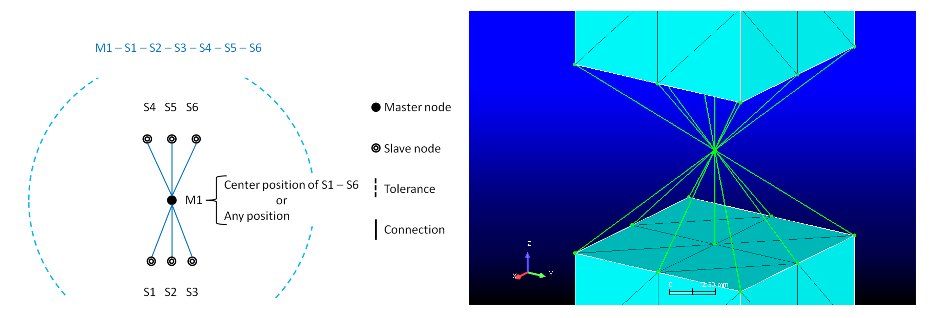
一対多(マスター:スレーブ)のRBE2(剛体要素)を作成する機能です。
Note
スレーブ節点は、パート単位、フェース単位、エッジ単位、要素単位、節点単位での選択が可能です。
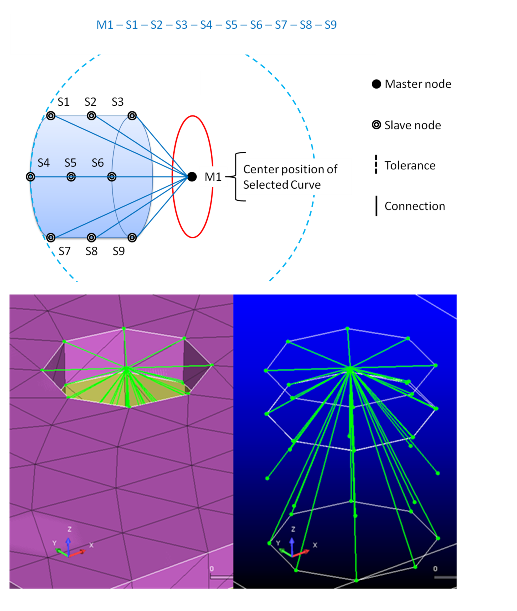
マスター節点と(接続範囲内の)スレーブ節点が接続されます。 マスター節点は、選択したスレーブ節点の平均座標または任意座標に作成されます。モデル外の位置にマスター節点を定義したい場合に、便利な機能です。
コマンドの場所
- 日本語環境:接続 > 詳細 > 剛体要素 > RBE2 > 中心へ
- 英語環境:Connection > Details > Rigid Elements > RBE2 > To Center
GUI
項目の説明
- 接続
-
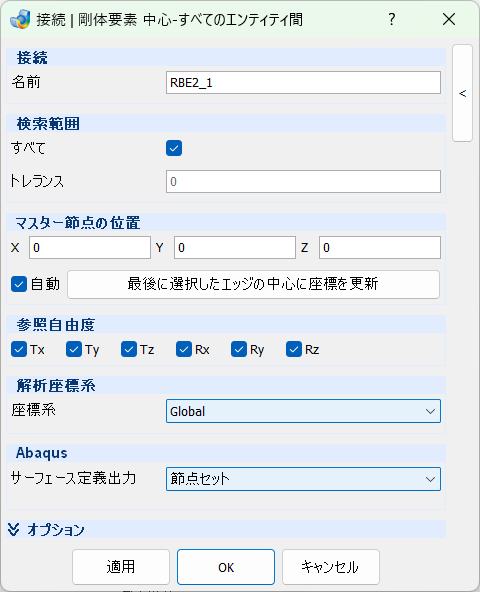
- 名前 – テキストボックス
-
登録される名前を入力します。
- 検索範囲
-
- すべて- チェックボックス
-
接続範囲を無限として指定します。
- トレランス – テキストボックス
-
接続範囲の半径Rを入力します。
- マスター節点の位置
-
- X Y Z – テキストボックス
-
マスター節点の座標が表示されます。
スレーブに選択されている節点の平均座標が自動設定されます。任意座標に編集することもできます。 - 自動 – チェックボックス
-
有効化すると選択されたエンティティに対するマスター節点の位置が自動計算されます。
- 最後に選択したエッジの中心に座標を更新 – ボタン
-
マスター節点の座標を、最後に選択したエッジの中心位置にします。該当エッジが曲線の場合は曲線の平均中心座標に、直線の場合は節点の平均座標になります。例えば、ボルト(円や円筒形状)の座面中心をマスターにできます。

- 参照自由度
-
従属自由度の成分を指定します。
-
- TX – チェックボックス
-
並進X方向自由度
- TY – チェックボックス
-
並進Y方向自由度
- TZ – チェックボックス
-
並進Z方向自由度
- RX – チェックボックス
-
回転X方向自由度
- RY – チェックボックス
-
回転Y方向自由度
- RZ – チェックボックス
-
回転Z方向自由度
- 解析座標系
-
- 座標系 – プルダウンメニュー
-
参照座標系を選択します。初期値のGlobalは全体座標系となり、ユーザが局所座標系を追加している場合は、プルダウンメニューに追加され選択可能となります。
- Abaqus
-
- サーフェース定義出力 – プルダウンメニュー
-
サーフェース(*SURFACE)の定義方法を選択します。
- 節点セット
-
節点でサーフェース(*SURFACE)を定義する場合に指定します。
- 要素セット
-
要素でサーフェース(*SURFACE)を定義する場合に指定します。スレーブに要素を構成できないエンティティ(節点、エッジ)を選択していると、エラーが出力されます。
- オプション
-
- 主節点のみ接続 – チェックボックス
-
選択したエンティティの主節点(コーナー節点)のみに接続します。
操作手順
- 接続範囲を設定します。
- スレーブ候補の節点を、パート、フェース、エッジ、要素、節点から選択します。
- 必要に応じて、マスター節点の座標を任意座標に編集します。
- パラメータを設定します。
- 適用/OKボタンをクリックします。